歡迎您的造訪,我們是道地台灣製造、研發的團隊,在此很感謝許多客戶的支持與愛護。才讓我們得以在一片不自行開發產品的風氣下,仍本著要有自有品牌之決心繼續努力;也希望大家能多多支持國貨,讓我們有您的支持而繼續發揚,謝謝!!
 |
| 微步進驅動技術 |
| 所謂兩相步進馬達,也就是市面上最常看到的步進馬達,它的解析度是每轉分成400格,是最傳統的步進馬達系統,而最新的步進馬達系統則是微步進系統,此種微步進技術是由歐美引進國內,它把所謂傳統的低價位二相步進馬達利用更高技術的驅動方式把解析度由傳統的每轉400格更細分為每轉51200格,如此一來,提高了馬達的精度及高速扭力及瞬間加減速的特性,現將二相驅動技術及微步進驅動技術概說如下 : |
 |
 |
| 圖一 (全步進,兩相激磁) |
圖二 (半步進) |
一般二相步進馬達驅動技術有全步進驅動方式(full step)、半步進驅動方式(half step)及微步進驅動方式(micro stepping),全步進驅動方式是把馬達之A,B相電流以圖一之電流波型方式去驅動,這種方式之馬達解析度為每轉分為200格,所以每一格的角度為360°/200格=1.8°,即控制器每送一個脈波到步進馬達驅動器後,驅動器會驅動馬達轉動1.8° ,此種方式的優點是驅動線路簡單,驅動器價格低廉,且在同樣的脈波速度下,馬達能有較高之轉速,其缺點則是因為馬達解析度較粗,所以慣性較大,馬達的加減速無法快,因此瞬間反應變慢。
而半步進驅動方式(half step)是把馬達之A,B相電流以圖二之電流波型方式驅動,這種方式之馬達解析度為每轉分為400格,所以每一格的角度為360°/400格= 0.9° ,即控制器每送一個脈波到步進馬達驅動器後,驅動器會驅動馬達轉動0.9°,此種方式的優點也是是驅動線路簡單,且因馬達解析度比全步進驅動方式更細一倍,所以馬達轉動時較平滑,振動較小,驅動器價格低,其缺點則是在某些場合應用上,因為馬達解析度還是不夠細,所以慣性還是大,瞬間反應慢。
另外歐美先進國家所採用的則是微步進驅動技術,把所謂的半步進驅動技術繼續延伸下去,把A,B相的驅動電流細分為更細的等分如圖三所示,結果產生出多種更細的馬達解析度,從每轉1000格~50000格間都有,即解析度從0.36°(360°/1000)到0.0072°(360°/50000),此微步進技術不但提供了更細的馬達解析度,也使的馬達的速度及扭力都提高了,也因為馬達解析度變得更細,所以馬達轉動時振動更小,更平滑且慣性也更小,因此大大的提高了馬達的動作反應時間,適用於更快的動作場合及要求更高精度的場合,配合美國太平洋科技專利技術Sigmax所生產之馬達更能表現出微步進的優點 |
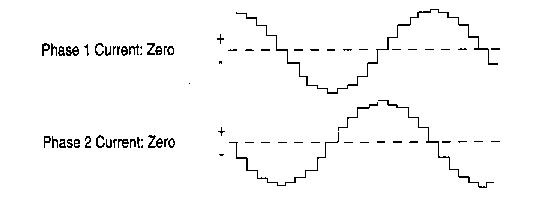 |
| 圖三 (微步進驅動) |
| |
|
|
 |
|
|

