歡迎您的造訪,我們是道地台灣製造、研發的團隊,在此很感謝許多客戶的支持與愛護。才讓我們得以在一片不自行開發產品的風氣下,仍本著要有自有品牌之決心繼續努力;也希望大家能多多支持國貨,讓我們有您的支持而繼續發揚,謝謝!!
 |
| 何謂點對點(PTP)及補間功能定位控制器 |
| 所謂的點對點(Point To Point)控制器,就是在多軸同時運動時,由某一點到另外一點的位置時,各軸依所設定的速度、加減速各自移動到所欲定位的位置點上,至於這多軸所走出來的路徑(平面或立體)會依各軸所設定的速度及定位位置長短而會有所不同,但最終還是都會定位在設定的定位點上,這就是所謂的點對點控制器,功能設計上較為單純,適用於一般只要求定點準而不要求定位時的路徑之場合使用,例如點膠機就是點對點控制器就可以了.下圖以2D XY平面定位的方式來表示點對點控制器的定位方式 . |
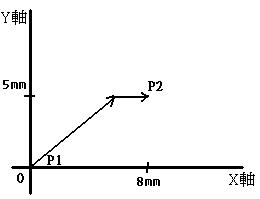 |
| (如上例所示,在直線補控制器的情況,X和Y軸要定位的長度各為5mm及8mm, 控制器會依所設定的向量速度去分別調整X、Y軸速度,然後使兩軸同時到達定點) |
| 而所謂的補間型控制器(就是除了一般的點對點定位控制外,另外還多了路徑補間(Inter-polation)的功能(至少2D以上,才有所謂的路徑補間),而補間功能大致又可分為直線補間( Linear interpolation)和圓弧補間兩種(Circular interpolation),一般直線補間都有2D或3D以上,而圓弧補間則一般都是2D,以平面的直線補間來說,同樣是和點對點控制器一樣要到某一點定位,但直線補間卻只設定一個向量(Vector)速度,而不是和點對點控制器依樣可以分別設定各軸的移動速度,因為直線補間是直接以所使用者所設定的向量速度(各軸的移動速度則是根據這向量速度由控制器內部自行去調整)由起始點移到結束點,且移動的路徑則是直線移動,不論平面上的兩軸哪一軸走比較長或是哪一軸走比較短,兩軸皆會同時到達定點,如下圖所示 : |
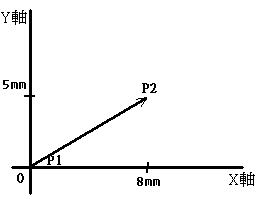 |
(如上例所示,在直線補控制器的情況,X和Y軸要定位的長度各為5mm及8mm, 控制器會依所設定的向量速度去分別調整X、Y軸速度,然後使兩軸同時到達定點)
|
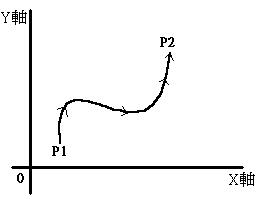
| 而圓弧補間,顧名思義就是走出來的路徑是一個弧或是圓,原理和直線補間差不多,只是走的路徑路不同,如下圖所示 |
|
| 一般使用補間控制器之時機是除了要求定點要準以外還要求定位時的路徑也要依規劃的路徑來移動,例如點膠機、雷射切割機、雕刻機等. |
| 對於一般補間型的控制器而言,若是用來控制步進馬達,則要注意馬達經過共振區所造成的振動問題,而若是用來控制伺服系統則要注意因伺服參數的調整問題造成所定位的路徑精準度問題,例如所走出來的圓是否為真圓等等. |
|
 |
|
|

