歡迎您的造訪,我們是道地台灣製造、研發的團隊,在此很感謝許多客戶的支持與愛護。才讓我們得以在一片不自行開發產品的風氣下,仍本著要有自有品牌之決心繼續努力;也希望大家能多多支持國貨,讓我們有您的支持而繼續發揚,謝謝!!
 |
| 全閉迴路、半閉迴路和開回路定位系統 |
在所謂的定位系統中有開迴路和閉回路定位系統兩種,所謂的開回路定位系統就是一般我們所用的步進/微步進定位系統,這種系統沒有所謂的回授控制(feedback),所以成本較低,其組成方式如圖一: |
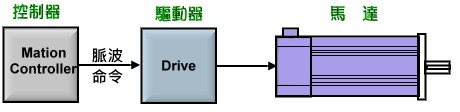 |
| 這種步進/微步進開回路系統,是由控制器、驅動器和馬達所組成,定位控制器送出脈波定位信號給步進馬達驅動器控制步進馬達轉動一格,但因有時馬達加上負載受力或馬達特性不佳時會發生步進馬達失步現象,亦即驅動器控制馬達轉時但馬達卻無法轉動,而此時因為沒有回授系統,所以控制器及驅動器並不知道馬達沒有轉動,所以就造成了馬達定位不準的現象了,一般要解決這種失步現象,最好是從馬達及驅動器特性和機械系統來改善.在馬達和驅動器方面,要選用比所需扭力還要大的步進馬達(一般是所需扭力的1.5倍以上)及選用特性較好的微步進驅動系統,而在機械改善方面則需將機械調整到最順運轉的情況,減少傳動效率上的損失 . |
| 而所謂的閉回路定位系統則是有所謂的回授信號,一般用於伺服馬達定位系統,此種的回授信號,一般是用編碼器(Encoder)或Resolver(解析器),但依照回授方式不同而又可分為半閉迴路系統和全閉迴路系統,半閉回路定位系統的組成方式如圖二 |
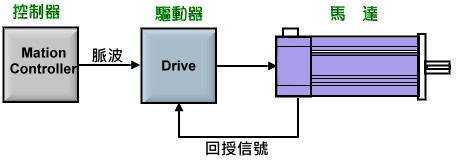 |
| 此種半閉迴路系統是將馬達尾端的回授信號回授至驅動器,所以驅動器可以偵測到馬達是否定位不準,而控制器到驅動器之間的架構也是如圖一的步進系統一樣,是送脈波信號的方式到驅動器,每送一個脈波信號到驅動器,馬達就轉一格(是伺服馬達每圈解析度的一格),而當馬達有不準時,驅動器可以因回授的信號而知道馬達已經不準,而輸出ERROR信號並將伺服馬達驅動電力直接關掉(disable),但此時控制器還是無法知道馬達定位不準,這也是一般大家常用的脈波命令式(Pulse Command)伺服馬達系統(日本伺服定位系統),而且此種系統架構若是控制器和驅動間的脈波定位信號若受到雜訊干擾,此脈波干擾信號也會被送入馬達驅動器而使馬達旋轉,且這是馬達到驅動器間之回授信號所無法察覺的,所以也使得統的穩定性降低了 . |
| 最後一種是全閉迴路系統,這是最完全的迴路系統,也是一般歐美伺服馬達系統所廣為採行的方式,其組成方式如圖三 |
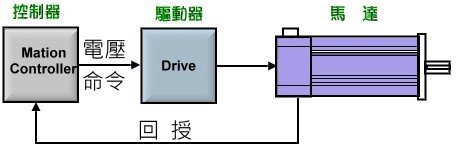 |
此種定位系統和前述的半閉迴路(日本伺服系統)所不同的是馬達尾端的回授信號是直接拉回到控制器上而不拉到驅動器,直接由控制器來偵測回授信號,而此時的伺服驅動器只是一個類似放大器(Amplifier)的功能(例如AMC DC伺服驅動器),由控制器送來的信號是電壓的方式(V Command) ,驅動器是根據此電壓命令來調整伺服馬達的轉速高低及方向,而定位功能則是在控制器完成,控制器會依據現在馬達回授的狀況去調整所輸出到驅動器的速度命令,所有的伺服參數都是在控制器上調整,此種方式是完全的閉迴路,也不須太考慮控制器和驅動器間的干擾信號,因為回授是直接回到控制器的,就算是控制器到驅動器間的速度命令受到干擾而影響到馬達,此時控制器也會依照馬達的回授信號來校正輸出的速度命令信號.完全的閉迴路,提供最完全而穩定的系統. |
|
 |
|
|

